New Products
See MoreBack in Stock
See MoreHome Automation
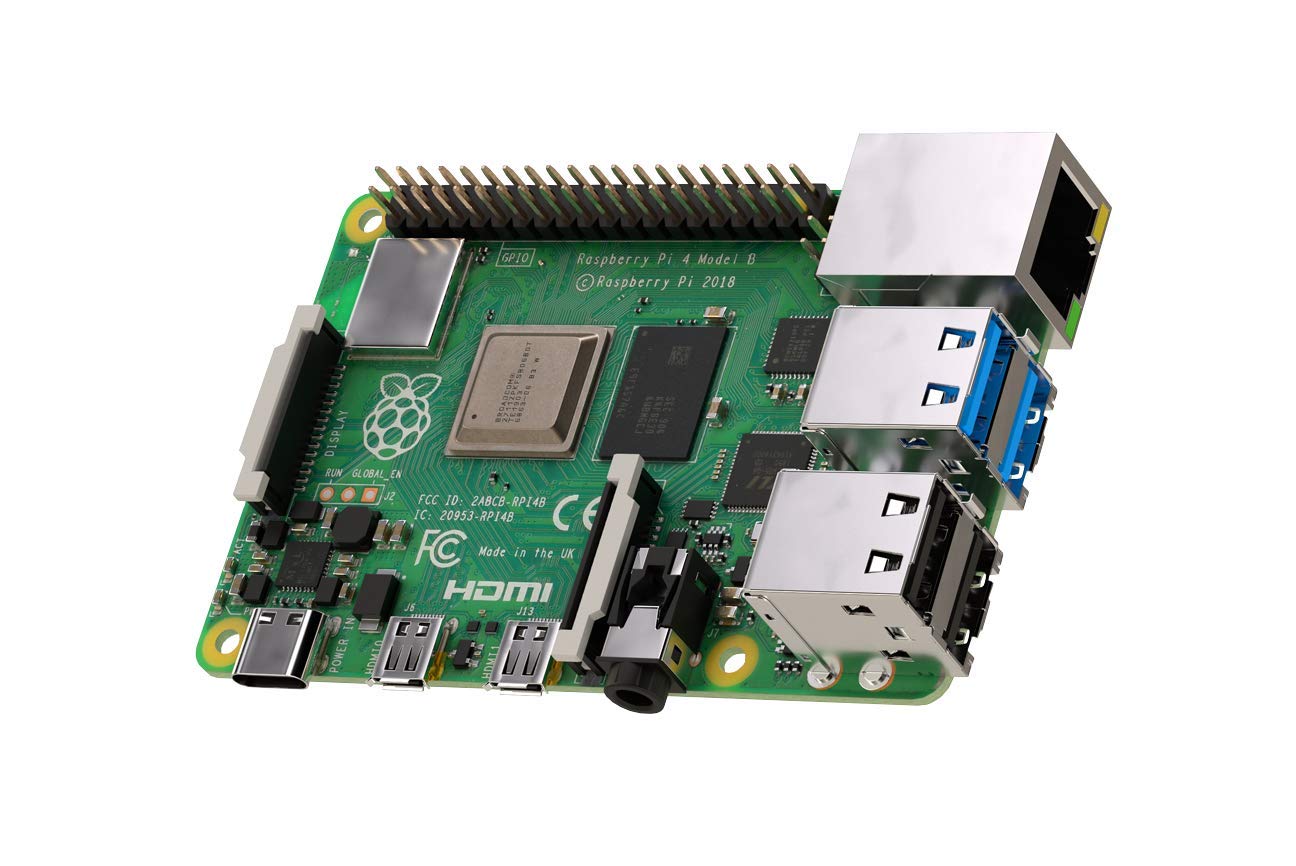
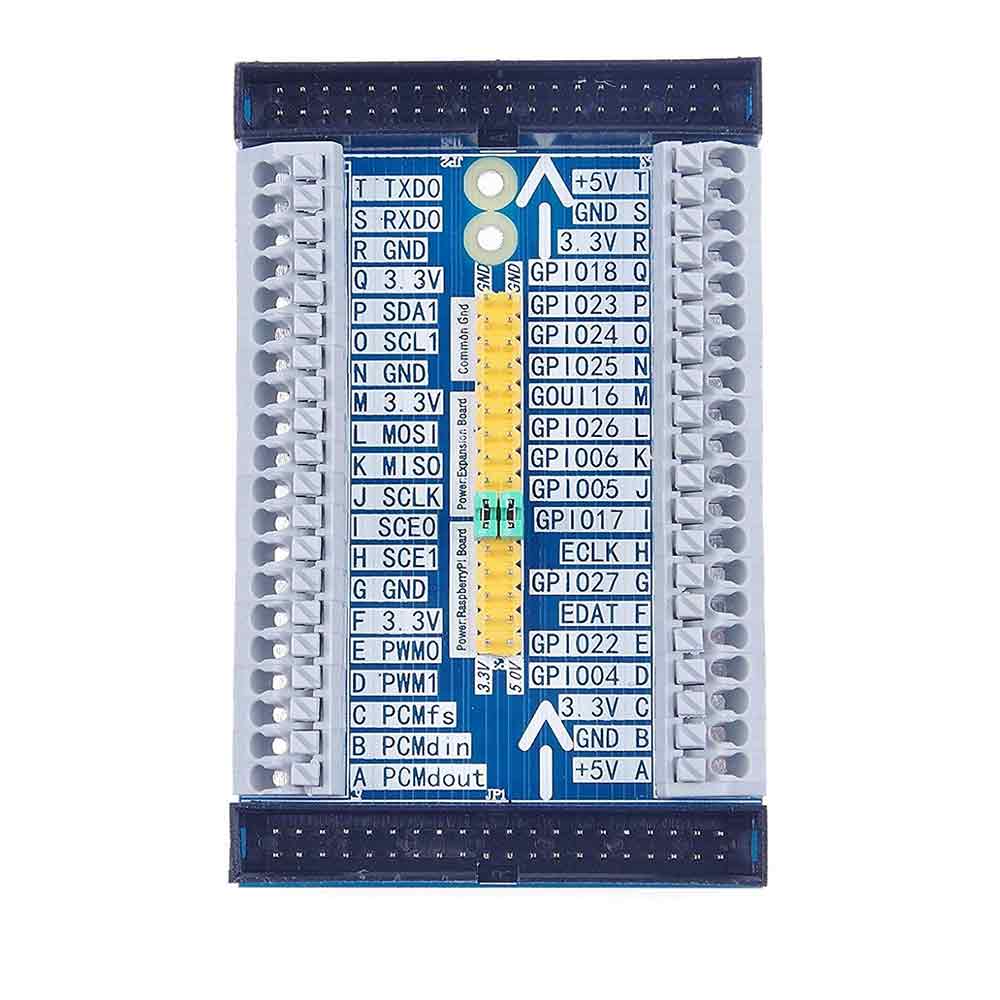
See MoreRASPBERRY PI & ACCESSORIES
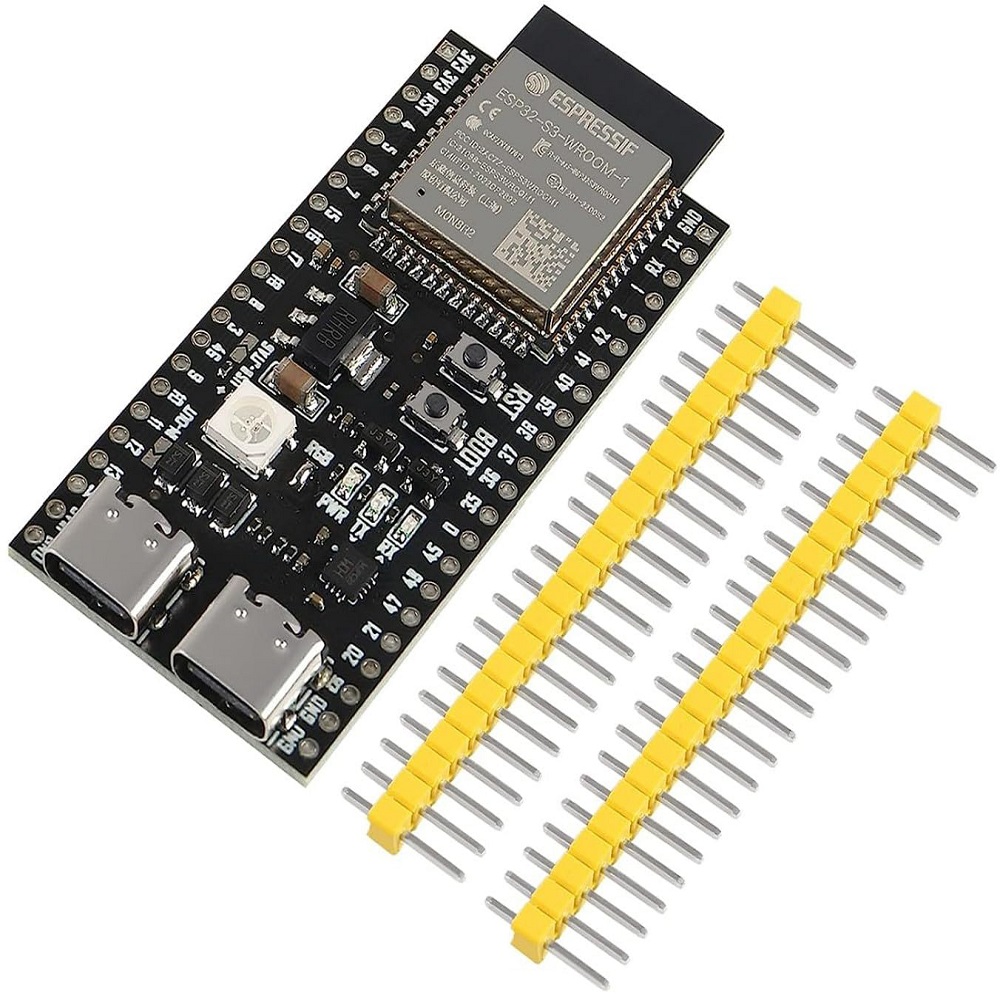
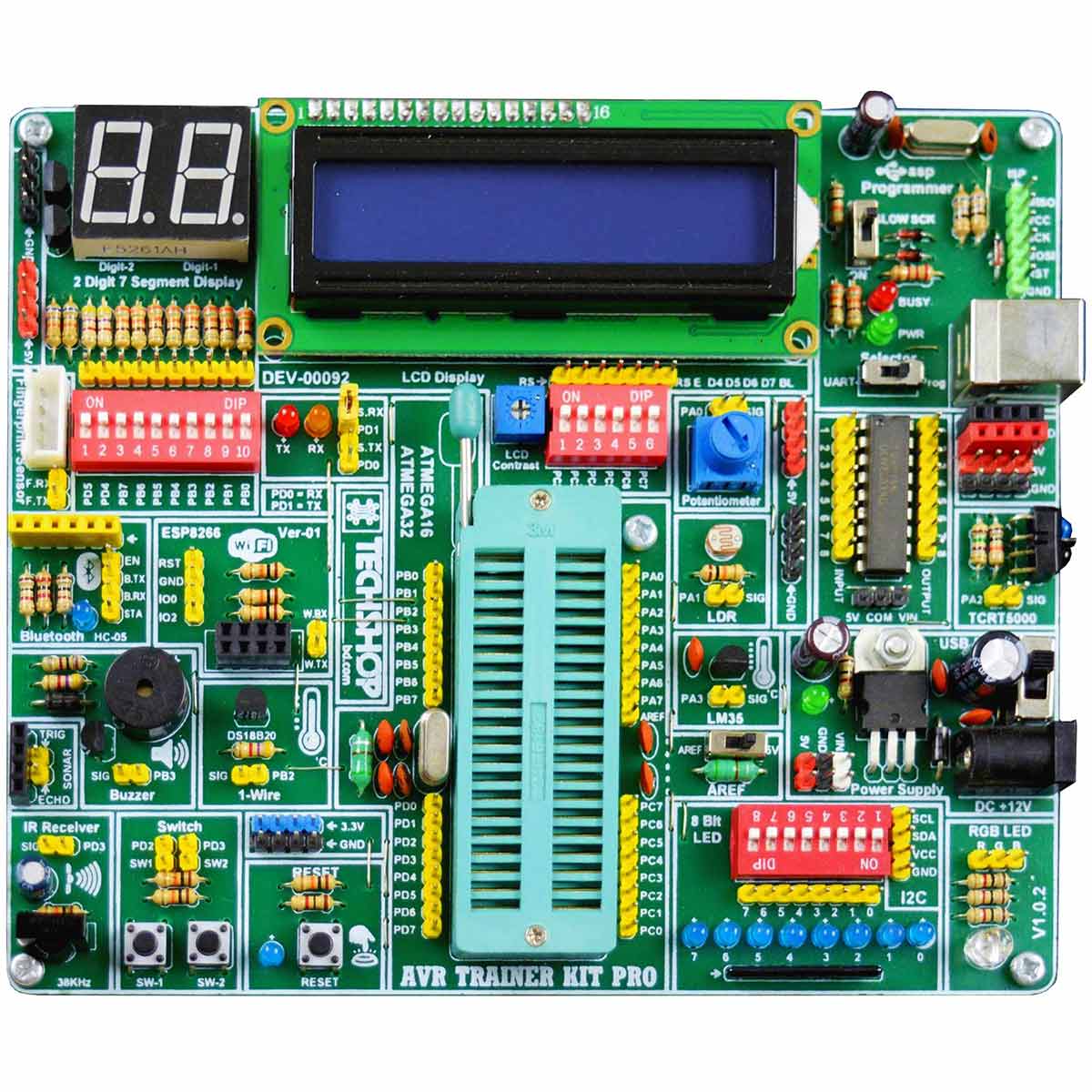
See MoreARDUINO & ACCESSORIES
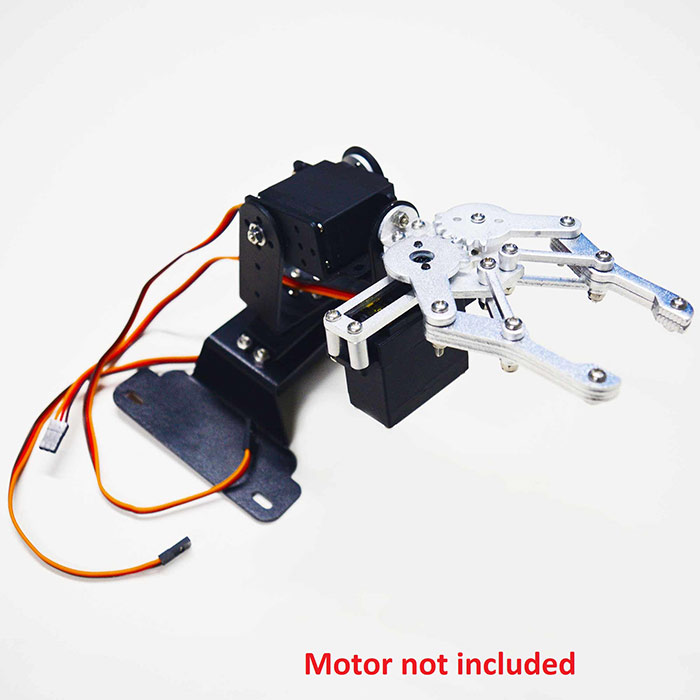
See MoreBasic Robotics
See MoreDeveloped by TechShop & Pi-LabsBD
See MoreVARIOUS TYPES OF SENSOR
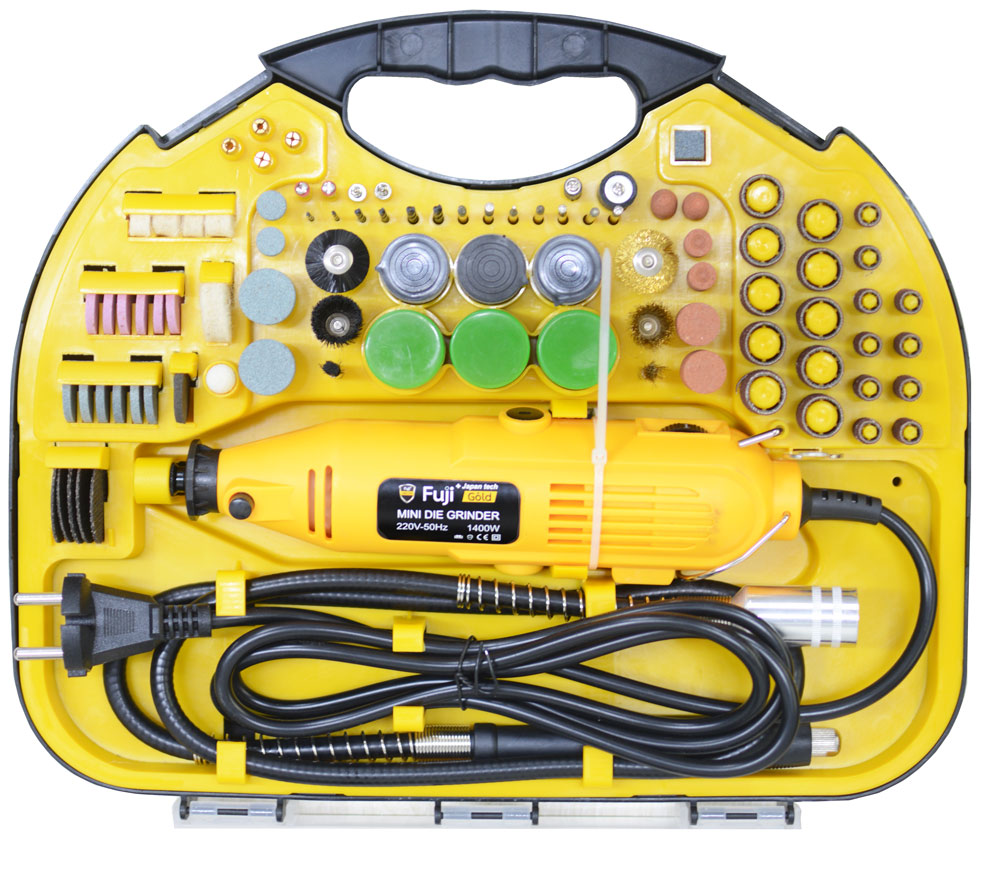
See MoreTools
See MoreOur Supplier

SparkFun, USA

Pi Labs, Bangladesh
Pololu, USA
Seeed Studio, China
DFRobot
Marketplace, Bangladesh
Hobbyking, Hong Kong

Techshop Bangladesh
Waveshare Electronics, China
.png)
Adafruit, USA
Help: 09678110110
09.00am - 08.00pm (7 days a week)
Pay cash on delivery
Pay cash at your doorstep
Service
All over Bangladesh
Warranty and Replacement
Up to 1 Year










.JPG)



.jpg)
_2.jpg)



.jpg)


.jpg)

01.jpg)








.jpg)


-01.jpg)